V2V Communication using Free Space Optics
Another project I’m really proud of, where I combined the principles of Optical Communication and Networking to develop a Vehicle-to-Vehicle (V2V) communication system using optics as the communication medium. I designed an error-resilient communication protocol from scratch and successfully demonstrated the transmission of vehicle lane changes, braking, and speed information to another vehicle through a free-space optics medium. #V2V #Networking #FSO
Project developed as part of the coursework ECE4005 – Optical Communication Network in my undergrad.
Working
Hardware Setup
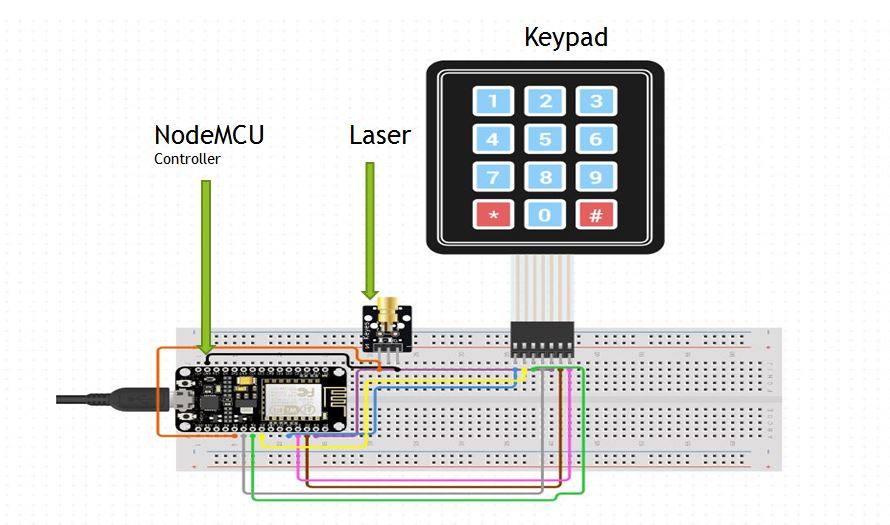
Transmitter End
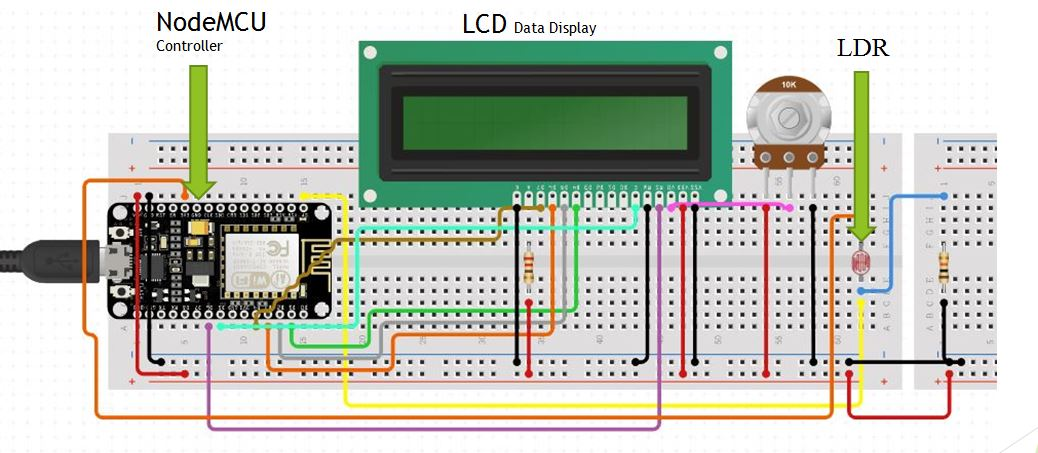
Receiver End
Working
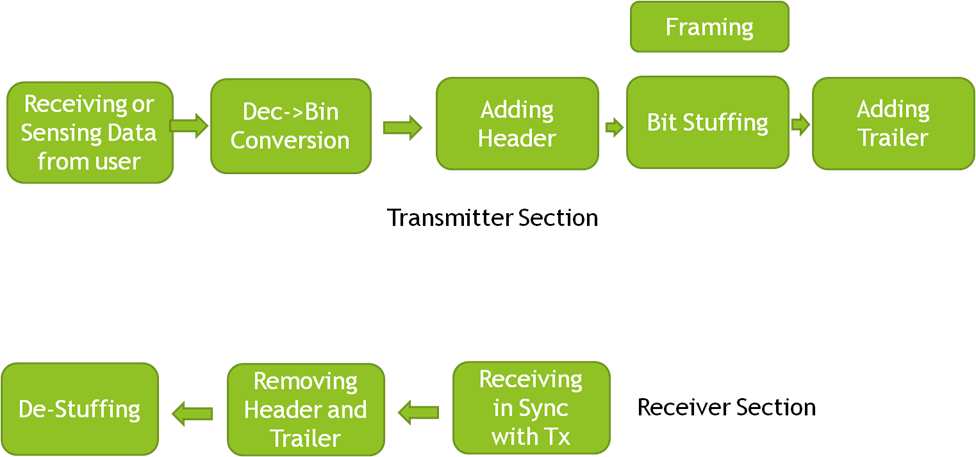
- At the Transmitter, It takes the input of speed/lane/brake information from the keypad and converts that into frame of bits and sends using LASER.
- At Receiver, a LDR detects the light and based on the intensity it determines 1/0 and reforms the frame bits into meaningful info. Once this is done it sends the ACK.
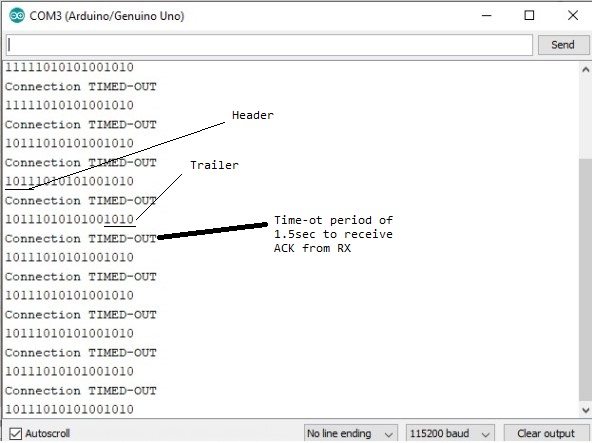
- At transmitter, it waits for a ACK for certain timeout period, if not received it retransmits again. During this transmission if the RX misses any bits, it can dynamically adjust the reception to the next incoming frame based on the header and trailer information.
Frame The frame is 17 bits long and the data bits are 9 bits long.
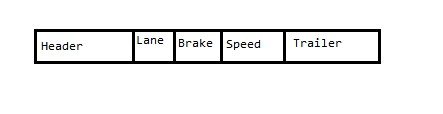
The dataword length is chosen based on the information transmitted range.
- Lane change - 1 bits (Left/Right)
- Braking - 1 bit (1/0)
- Speed - 7 bit (MAX_SPEED = 127)
Synchronization
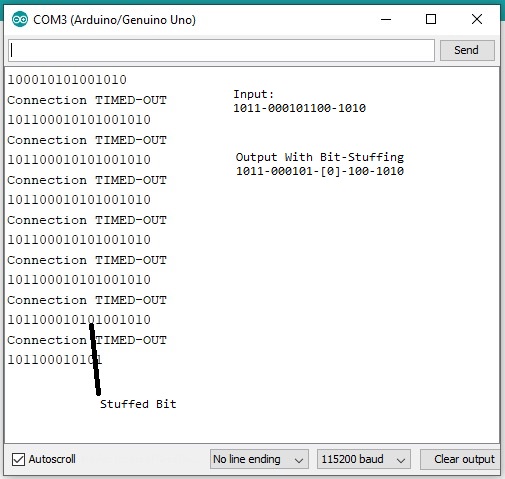
We implemented a header/trailer system with bit stuffing. Due to this additional feature the frames which are partially missed by the receiver, can be received again without much re transmission. Header - 1011 , trailer - 1010.
The system follows Stop and Wait protocol. The sender waits for a ACK from the receiver after each frame, if not received, transmitter sends the frame again. Right now the timeout period for acknowledgement is 1.5sec at the transmitter end.
Bit Stuffing and De Stuffing